Bộ chuyển đổi tín hiệu số sang tương tự: mô tả, nguyên lý hoạt động, ứng dụng. Chuyển đổi tương tự sang kỹ thuật số cho người mới bắt đầu
Bài giảng số 3
"Chuyển đổi tương tự sang kỹ thuật số và kỹ thuật số sang tương tự."
Trong các hệ thống vi xử lý, vai trò của phần tử xung được thực hiện bởi bộ chuyển đổi tương tự sang số (ADC) và vai trò của bộ ngoại suy được thực hiện bởi bộ chuyển đổi kỹ thuật số sang tương tự (DAC).
Chuyển đổi tương tự sang kỹ thuật số bao gồm việc chuyển đổi thông tin chứa trong tín hiệu tương tự thành mã số . Chuyển đổi kỹ thuật số sang tương tựđược thiết kế để thực hiện nhiệm vụ nghịch đảo, tức là chuyển đổi một số được biểu diễn dưới dạng mã kỹ thuật số thành tín hiệu tương tự tương đương.
Theo quy định, ADC được cài đặt trong mạch phản hồi của hệ thống điều khiển kỹ thuật số để chuyển đổi tín hiệu phản hồi tương tự thành mã được phần kỹ thuật số của hệ thống cảm nhận. Cái đó. ADC thực hiện một số chức năng, chẳng hạn như: lấy mẫu thời gian, lượng tử hóa mức độ, mã hóa. Sơ đồ khối tổng quát của ADC được thể hiện trên hình 3.1.
Tín hiệu ở dạng dòng điện hoặc điện áp được cung cấp cho đầu vào của ADC, tín hiệu này được lượng tử hóa theo mức trong quá trình chuyển đổi. Đặc tính tĩnh lý tưởng của ADC 3 bit được thể hiện trong hình 3.2.
 |
Tín hiệu đầu vào có thể nhận bất kỳ giá trị nào trong phạm vi từ – Umax đến Umax và các đầu ra tương ứng với tám (2 3) mức riêng biệt. Giá trị của điện áp đầu vào tại đó xảy ra sự chuyển đổi từ một giá trị của mã đầu ra ADC sang giá trị lân cận khác được gọi là điện áp chuyển tiếp mã hóa. Sự khác biệt giữa hai giá trị liền kề của chuyển đổi mã hóa được gọi là bước lượng tử hóa hoặc Đơn vị bit có ý nghĩa nhỏ nhất (LSB).Điểm khởi đầu của các đặc điểm chuyển đổi là điểm được xác định bởi giá trị của tín hiệu đầu vào, được xác định là
![]() (3.1),
(3.1),
trong đó U 0,1 – điện áp của quá trình chuyển đổi mã hóa đầu tiên, U LSB – bước lượng tử hóa ( LSB - Bit ít quan trọng nhất ). chuyển đổi tương ứng với điện áp đầu vào được xác định bởi mối quan hệ
![]() (3.2).
(3.2).
Dải điện áp đầu vào ADC được giới hạn ở U 0,1 và U N-1,N gọi điện dải điện áp đầu vào.
(3.3).
Dải điện áp đầu vào và giá trị LSB N -bit ADC và DAC được kết nối theo tỷ lệ
(3.4).
Vôn
(3.5)
gọi điện điện áp quy mô đầy đủ ( FSR – Phạm vi toàn thang ). Thông thường, tham số này được xác định bởi mức đầu ra của nguồn điện áp tham chiếu được kết nối với ADC. Kích thước của bước lượng tử hóa hoặc đơn vị của chữ số có nghĩa nhỏ nhất, tức là tương đương với
(3.6),
và giá trị đơn vị của chữ số có nghĩa nhất
![]() (3.7).
(3.7).
Như có thể thấy trong Hình 3.2, trong quá trình chuyển đổi xảy ra lỗi không vượt quá một nửa giá trị của bit có trọng số nhỏ nhất U LSB /2.
Có nhiều phương pháp chuyển đổi tương tự sang số khác nhau, khác nhau về độ chính xác và tốc độ. Trong hầu hết các trường hợp, những đặc điểm này đối lập nhau. Hiện nay, các loại bộ chuyển đổi như ADC xấp xỉ liên tiếp (cân bằng bit), ADC tích hợp, song song ( Tốc biến ) ADC, ADC “sigma-delta”, v.v.
Sơ đồ khối của ADC xấp xỉ liên tiếp được thể hiện trên hình 3.3.

Các thành phần chính của thiết bị là bộ so sánh (K), bộ chuyển đổi kỹ thuật số sang tương tự (DAC) và mạch điều khiển logic. Nguyên tắc chuyển đổi dựa trên sự so sánh tuần tự giữa mức tín hiệu đầu vào với các mức tín hiệu tương ứng với các kết hợp khác nhau của mã đầu ra và việc hình thành mã kết quả dựa trên kết quả so sánh. Thứ tự của các mã so sánh thỏa mãn quy tắc một nửa. Khi bắt đầu chuyển đổi, mã đầu vào DAC được đặt ở trạng thái trong đó tất cả các bit ngoại trừ bit quan trọng nhất là 0 và quan trọng nhất là 1. Với sự kết hợp này, điện áp bằng một nửa dải điện áp đầu vào được tạo ra tại đầu ra DAC. Điện áp này được so sánh với điện áp đầu vào của bộ so sánh. Nếu tín hiệu đầu vào lớn hơn tín hiệu đến từ DAC thì bit quan trọng nhất của mã đầu ra được đặt thành 1, nếu không thì nó được đặt lại về 0. Ở chu kỳ xung nhịp tiếp theo, mã được hình thành một phần theo cách này lại được đặt lại nhận được ở đầu vào của DAC, bit tiếp theo được đặt thành 1 và quá trình so sánh lặp lại. Quá trình tiếp tục cho đến khi bit có ý nghĩa nhỏ nhất được so sánh. Cái đó. hình thành N -bit mã đầu ra yêu cầu N chu kỳ so sánh cơ bản giống hệt nhau. Điều này có nghĩa là, nếu các yếu tố khác không đổi, hiệu suất của ADC như vậy sẽ giảm khi tăng dung lượng bit của nó. Các phần tử bên trong của ADC xấp xỉ liên tiếp (DAC và bộ so sánh) phải có độ chính xác cao hơn một nửa bit có ý nghĩa nhỏ nhất của ADC.
Sơ đồ khối song song ( Tốc biến ) ADC được thể hiện ở hình 3.4.

Trong trường hợp này, điện áp đầu vào được cung cấp để so sánh ngay lập tức với các đầu vào cùng tên N -1 bộ so sánh. Đầu vào ngược lại của bộ so sánh được cung cấp tín hiệu từ bộ chia điện áp có độ chính xác cao, được kết nối với nguồn điện áp tham chiếu. Trong trường hợp này, điện áp từ các đầu ra của bộ chia được phân bổ đều dọc theo toàn bộ phạm vi thay đổi của tín hiệu đầu vào. Bộ mã hóa ưu tiên tạo ra tín hiệu đầu ra kỹ thuật số tương ứng với bộ so sánh cao nhất có tín hiệu đầu ra được kích hoạt. Cái đó. cung cấp N -bit chuyển đổi yêu cầu 2 N điện trở chia và 2 N -1 bộ so sánh. Đây là một trong những phương pháp chuyển đổi nhanh nhất. Tuy nhiên, với dung lượng lớn thì đòi hỏi chi phí phần cứng lớn. Độ chính xác của tất cả các điện trở chia và so sánh lại phải cao hơn một nửa giá trị LSB.
Sơ đồ khối của ADC tích hợp kép được thể hiện trên hình 3.5.
 |
Các thành phần chính của hệ thống là một công tắc tương tự bao gồm các phím SW 1, SW 2, SW 3, bộ tích phân I, bộ so sánh K và bộ đếm C. Quá trình chuyển đổi bao gồm ba giai đoạn (Hình 3.6).
 |
Trong giai đoạn đầu tiên chìa khóa được đóng lại S.W. 1 và các phím còn lại đều mở. Thông qua một chìa khóa đóng S.W. 1, điện áp đầu vào được đưa vào bộ tích hợp, bộ tích hợp này sẽ tích hợp tín hiệu đầu vào trong một khoảng thời gian cố định. Sau khoảng thời gian này, mức tín hiệu đầu ra của bộ tích phân tỷ lệ thuận với giá trị của tín hiệu đầu vào. Ở giai đoạn chuyển đổi thứ hai, chìa khóa S.W. 1 mở và chìa khóa S.W. 2 đóng lại và tín hiệu từ nguồn điện áp tham chiếu được cung cấp cho đầu vào bộ tích hợp. Tụ tích hợp được phóng điện từ điện áp tích lũy trong khoảng thời gian chuyển đổi đầu tiên với tốc độ không đổi tỷ lệ với điện áp tham chiếu. Giai đoạn này tiếp tục cho đến khi điện áp đầu ra của bộ tích hợp giảm xuống 0, được biểu thị bằng đầu ra của bộ so sánh, so sánh tín hiệu của bộ tích phân với 0. Thời lượng của giai đoạn thứ hai tỷ lệ thuận với điện áp đầu vào của bộ chuyển đổi. Trong toàn bộ giai đoạn thứ hai, các xung tần số cao với tần số đã hiệu chỉnh sẽ được gửi đến bộ đếm. Cái đó. sau giai đoạn thứ hai, số chỉ của đồng hồ kỹ thuật số tỷ lệ thuận với điện áp đầu vào. Sử dụng phương pháp này có thể đạt được độ chính xác rất tốt mà không cần đặt ra yêu cầu cao về độ chính xác và độ ổn định của các bộ phận. Đặc biệt, độ ổn định của điện dung bộ tích hợp có thể không cao, vì chu kỳ sạc và phóng điện xảy ra với tốc độ tỷ lệ nghịch với điện dung. Hơn nữa, độ lệch và lỗi bù của bộ so sánh được bù bằng cách bắt đầu và kết thúc mỗi bước chuyển đổi ở cùng một điện áp. Để cải thiện độ chính xác, giai đoạn chuyển đổi thứ ba được sử dụng, khi bộ tích hợp nhập thông qua một phím S.W. 3 tín hiệu bằng 0 được đưa ra. Bởi vì cùng một bộ tích phân và bộ so sánh được sử dụng trong bước này nên việc trừ giá trị lỗi đầu ra ở mức 0 khỏi phép đo tiếp theo có thể bù cho các lỗi liên quan đến các phép đo gần bằng 0. Các yêu cầu nghiêm ngặt không được áp đặt ngay cả đối với tần số xung đồng hồ đến bộ đếm, bởi vì một khoảng thời gian cố định ở giai đoạn chuyển đổi đầu tiên được hình thành từ các xung giống nhau. Các yêu cầu nghiêm ngặt chỉ được áp dụng đối với dòng phóng điện, tức là tới nguồn điện áp tham chiếu. Nhược điểm của phương pháp chuyển đổi này là hiệu suất thấp.
ADC được đặc trưng bởi một số tham số cho phép chọn một thiết bị cụ thể dựa trên các yêu cầu của hệ thống. Tất cả các tham số ADC có thể được chia thành hai nhóm: tĩnh và động. Cái trước xác định các đặc tính chính xác của thiết bị khi làm việc với tín hiệu đầu vào thay đổi chậm hoặc liên tục và cái sau đặc trưng cho hiệu suất của thiết bị là duy trì độ chính xác khi tần số của tín hiệu đầu vào tăng lên.
Mức lượng tử hóa nằm trong vùng lân cận 0 của tín hiệu đầu vào tương ứng với điện áp chuyển tiếp giữa các mã là –0,5 U LSB và 0,5 U LSB (điều đầu tiên chỉ xảy ra trong trường hợp tín hiệu đầu vào lưỡng cực). Tuy nhiên, trong các thiết bị thực, các điện áp chuyển tiếp mã hóa này có thể khác với các giá trị lý tưởng này. Độ lệch mức thực tế của các điện áp chuyển tiếp mã hóa này so với giá trị lý tưởng của chúng được gọi là lỗi bù điểm lưỡng cực ( Lỗi lưỡng cực bằng không ) Và lỗi bù điểm 0 đơn cực ( Lỗi bù bằng không ) tương ứng. Đối với phạm vi chuyển đổi lưỡng cực, sai số bù 0 thường được sử dụng và đối với phạm vi chuyển đổi đơn cực, sai số bù đơn cực thường được sử dụng. Sai số này dẫn đến sự dịch chuyển song song của đặc tính biến đổi thực so với đặc tính lý tưởng dọc theo trục hoành (Hình 3.7).
 |
Độ lệch của mức tín hiệu đầu vào tương ứng với lần chuyển mã liên mã cuối cùng so với giá trị lý tưởng của nó U FSR -1,5 U LSB , gọi điện lỗi toàn diện ( Lỗi toàn thang).
Tỷ lệ chuyển đổi ADC được gọi là tiếp tuyến của góc nghiêng của đường thẳng vẽ qua điểm đầu và điểm cuối của đặc tính biến đổi thực. Sự khác biệt giữa giá trị thực tế và lý tưởng của hệ số chuyển đổi được gọi là lỗi hệ số chuyển đổi (Đạt được lỗi ) (Hình 3.7). Nó bao gồm các sai số ở cuối thang đo nhưng không bao gồm các sai số ở điểm 0 của thang đo. Đối với phạm vi đơn cực, nó được định nghĩa là chênh lệch giữa sai số toàn thang đo và sai số bù điểm 0 đơn cực, và đối với phạm vi lưỡng cực, nó được định nghĩa là chênh lệch giữa sai số toàn thang đo và sai số bù điểm 0 lưỡng cực. Trên thực tế, trong mọi trường hợp, đây là độ lệch của khoảng cách lý tưởng giữa lần chuyển đổi mã hóa cuối cùng và đầu tiên (bằng U FSR -2 U LSB ) so với giá trị thực của nó.
Lỗi bù 0 và lỗi khuếch đại có thể được bù bằng cách điều chỉnh bộ tiền khuếch đại ADC. Để làm được điều này, bạn cần có một vôn kế có độ chính xác không quá 0,1. U LSB . Để làm cho hai lỗi này trở nên độc lập, trước tiên hãy sửa lỗi bù 0 và sau đó là lỗi hệ số chuyển đổi.Để sửa lỗi bù 0 của ADC, bạn phải:
1. Đặt điện áp đầu vào chính xác là 0,5 U LSB ;
2. Điều chỉnh độ lệch của bộ tiền khuếch đại ADC cho đến khi ADC chuyển sang trạng thái 00…01.
Để sửa lỗi của hệ số chuyển đổi cần thiết:
1. Đặt điện áp đầu vào chính xác ở mức U FSR -1,5 U LSB ;
2. Điều chỉnh mức tăng của bộ tiền khuếch đại ADC cho đến khi ADC chuyển sang trạng thái 11...1.
Do các phần tử của mạch ADC không hoàn hảo nên các bước tại các điểm khác nhau của đặc tính ADC khác nhau về độ lớn và không bằng nhau. U LSB (Hình 3.8).
 |
Độ lệch khoảng cách giữa trung điểm của hai bước lượng tử hóa thực liền kề so với giá trị lý tưởng của bước lượng tử hóa U LSB gọi điện phi tuyến vi sai (DNL – Tính phi tuyến vi phân). Nếu DNL lớn hơn hoặc bằng U LSB , thì ADC có thể có cái gọi là “mã bị thiếu” (Hình 3.3). Điều này kéo theo sự thay đổi cục bộ mạnh mẽ trong hệ số truyền ADC, điều này trong các hệ thống điều khiển vòng kín có thể dẫn đến mất ổn định.
Đối với những ứng dụng cần duy trì tín hiệu đầu ra với độ chính xác nhất định, điều quan trọng là mã đầu ra ADC phải khớp với điện áp chuyển tiếp giữa các mã càng sát càng tốt. Độ lệch tối đa của tâm bước lượng tử hóa trên đặc tính ADC thực so với đặc tính tuyến tính hóa được gọi là tính phi tuyến tích phân (INL – Tính phi tuyến tích phân) hoặcđộ chính xác tương đối (Độ chính xác tương đối) ADC (Hình 3.9).
 |
Đặc tính tuyến tính hóa được vẽ thông qua các điểm cực trị của đặc tính biến đổi thực, sau khi chúng đã được hiệu chỉnh, tức là. Lỗi bù bằng 0 và hệ số chuyển đổi đã được loại bỏ.
Hầu như không thể bù các sai số trong tính phi tuyến vi phân và tích phân bằng các phương pháp đơn giản.
độ phân giải ADC ( Nghị quyết ) là nghịch đảo của số tổ hợp mã tối đa ở đầu ra ADC
(3.8).
Tham số này xác định mức tín hiệu đầu vào tối thiểu (so với tín hiệu biên độ đầy đủ) mà ADC có thể cảm nhận được.
Độ chính xác và độ phân giải là hai đặc điểm độc lập. Độ phân giải đóng vai trò quyết định khi điều quan trọng là phải cung cấp dải động nhất định của tín hiệu đầu vào. Độ chính xác rất quan trọng khi cần duy trì biến được kiểm soát ở mức nhất định với độ chính xác cố định.
Dải động của ADC (DR - Dải động ) là tỷ số giữa mức điện áp đầu vào cảm nhận được lớn nhất và mức điện áp đầu vào tối thiểu, tính bằng dB
![]() (3.9).
(3.9).
Tham số này xác định lượng thông tin tối đa mà ADC có khả năng truyền. Vì vậy, đối với ADC 12 bit DR = 72 dB.
Đặc tính của ADC thực khác với đặc tính của thiết bị lý tưởng do có các phần tử không lý tưởng của thiết bị thực. Hãy xem xét một số tham số đặc trưng cho ADC thực.
Tỷ lệ tín hiệu trên tạp âm(SNR - Tỷ lệ tín hiệu trên nhiễu ) là tỷ số giữa giá trị rms của tín hiệu hình sin đầu vào với giá trị rms của nhiễu, được định nghĩa là tổng của tất cả các thành phần phổ khác đến một nửa tần số lấy mẫu, không bao gồm thành phần DC. Vì sự hoàn hảo N -bit ADC chỉ tạo ra nhiễu lượng tử hóa SNR , tính bằng decibel, có thể được định nghĩa là
 (3.10),
(3.10),
ở đâu N - Công suất ADC. Vì vậy, đối với ADC lý tưởng 12 bit SNR =74dB. Giá trị này lớn hơn dải động của cùng một ADC vì Mức tối thiểu của tín hiệu thu được phải lớn hơn mức nhiễu. Công thức này chỉ tính đến nhiễu lượng tử hóa và không tính đến các nguồn nhiễu khác tồn tại trong ADC thực. Vì vậy, các giá trị SNR đối với ADC thực, nó thường thấp hơn mức lý tưởng. Giá trị điển hình SNR đối với ADC 12 bit thực là 68-70 dB.
Nếu tín hiệu đầu vào có độ dao động ít hơn bạn FSR , thì công thức cuối cùng cần được điều chỉnh
(3.11),
trong đó KOS là độ suy giảm của tín hiệu đầu vào, tính bằng dB. Vì vậy, nếu tín hiệu đầu vào của ADC 12 bit có biên độ nhỏ hơn 10 lần so với một nửa điện áp toàn thang đo thì KOS = -20 dB và SNR =74 dB – 20 dB = 54 dB.
Ý nghĩa thực sự SNR có thể được sử dụng cho xác định số lượng bit ADC hiệu dụng( ENOB – Số Bit Hiệu Quả ). Nó được xác định bởi công thức
![]() (3.12).
(3.12).
Chỉ báo này có thể mô tả khả năng quyết định thực tế của ADC thực. Do đó, ADC 12 bit dành cho nó. SNR =68 dB đối với tín hiệu có KOS = -20 dB thực tế là 7 bit ( ENOB = 7,68). Giá trị ENOB phụ thuộc rất nhiều vào tần số của tín hiệu đầu vào, tức là Dung lượng bit hiệu dụng của ADC giảm khi tần số tăng.
Tổng độ méo hài ( THD – Tổng méo hài ) là tỷ lệ của tổng các giá trị bình phương trung bình gốc của tất cả các sóng hài cao hơn với giá trị bình phương trung bình gốc của sóng hài cơ bản
 (3.13),
(3.13),
ở đâu n thường bị giới hạn ở mức 6 hoặc 9. Thông số này đặc trưng cho mức độ méo hài của tín hiệu đầu ra ADC so với đầu vào. THD tăng theo tần số của tín hiệu đầu vào.
Dải tần công suất đầy đủ ( FPBW – Băng thông toàn năng ) là tần số đỉnh tới đỉnh cực đại của tín hiệu đầu vào tại đó biên độ của thành phần cơ bản được tái tạo giảm không quá 3 dB. Khi tần số của tín hiệu đầu vào tăng lên, các mạch tương tự của ADC không còn thời gian để xử lý các thay đổi của nó với độ chính xác nhất định, dẫn đến hệ số chuyển đổi ADC giảm ở tần số cao.
Cài đặt thời gian (Cài đặt thời gian ) là thời gian cần thiết để ADC đạt được độ chính xác định mức sau khi đưa tín hiệu bước có biên độ bằng toàn dải tín hiệu đầu vào vào đầu vào của nó. Tham số này bị giới hạn do tốc độ hữu hạn của các nút ADC khác nhau.
Do có nhiều loại lỗi khác nhau nên đặc tính của ADC thực là phi tuyến tính. Nếu một tín hiệu có phổ gồm hai sóng hài được đưa vào đầu vào của một thiết bị có tính phi tuyến f a và fb , thì trong phổ tín hiệu đầu ra của thiết bị đó, ngoài các hài chính sẽ có các hài phụ xuyên điều chế có tần số, ở đâu m, n =1,2,3,... Các hài bậc hai là f a + f b , f a - f b , hài bậc ba là 2 f a + f b , 2 f a - f b , f a +2 f b , f a -2 f b . Nếu các sóng sin đầu vào có tần số tương tự nhau, nằm gần mép trên của băng thông thì các hài bậc hai sẽ cách xa các sóng sin đầu vào và nằm ở vùng tần số thấp hơn, trong khi các hài bậc ba có tần số gần với tần số tần số đầu vào.
Hệ số biến dạng xuyên điều chế ( Sự biến dạng của Intermodulatin ) là tỷ lệ giữa tổng các giá trị bình phương trung bình gốc của các hài phụ xuyên điều chế của một bậc nhất định với tổng các giá trị bình phương trung bình gốc của các hài cơ bản, tính bằng dB
 (3.14).
(3.14).
Bất kỳ phương pháp chuyển đổi tương tự sang kỹ thuật số nào cũng cần một khoảng thời gian hữu hạn để hoàn thành. Dưới Thời gian chuyển đổi ADC ( Thời gian chuyển đổi ) đề cập đến khoảng thời gian kể từ thời điểm tín hiệu tương tự đến đầu vào ADC cho đến khi mã đầu ra tương ứng xuất hiện. Nếu tín hiệu đầu vào của ADC thay đổi theo thời gian thì thời gian chuyển đổi hữu hạn của ADC sẽ dẫn đến sự xuất hiện của cái gọi là. lỗi khẩu độ(Hình 3.10).
 |
Tín hiệu bắt đầu chuyển đổi đến vào lúc này t 0 và mã đầu ra xuất hiện vào lúc này t 1 . Trong thời gian này, tín hiệu đầu vào được quản lý để thay đổi một lượngD bạn . Sự không chắc chắn phát sinh: mức giá trị tín hiệu đầu vào nằm trong phạm vi U 0 – U 0 + D bạn tương ứng với mã đầu ra này. Để duy trì độ chính xác của chuyển đổi ở mức độ thống nhất của bit có ý nghĩa nhỏ nhất, điều cần thiết là trong thời gian chuyển đổi, sự thay đổi giá trị của tín hiệu ở đầu vào của ADC không được lớn hơn giá trị của một trong những giá trị nhỏ nhất. chút đáng kể
![]() (3.15).
(3.15).
Sự thay đổi mức tín hiệu trong quá trình chuyển đổi có thể được tính gần đúng như
 (3.16),
(3.16),
Uin ở đâu – Điện áp đầu vào ADC, Tc - thời gian chuyển đổi. Thay (3.16) vào (3.15) ta được
![]() (3.17).
(3.17).
Nếu đầu vào là tín hiệu hình sin có tần số f
![]() (3.18),
(3.18),
thì đạo hàm của nó sẽ bằng
![]() (3.19).
(3.19).
Nó đạt giá trị lớn nhất khi cosine bằng 1. Thay (3.9) vào (3.7) với điều này, chúng ta nhận được
![]() , hoặc
, hoặc
(3.20)
Thời gian chuyển đổi hữu hạn của ADC dẫn đến yêu cầu hạn chế tốc độ thay đổi của tín hiệu đầu vào. Để giảm lỗi khẩu độ, v.v. để làm suy yếu giới hạn về tốc độ thay đổi của tín hiệu đầu vào ADC ở đầu vào bộ chuyển đổi, cái gọi là "thiết bị lưu trữ mẫu" (SSD) (Đơn vị theo dõi/giữ ). Sơ đồ đơn giản của UVH được thể hiện trong hình 3.11.
 |
Thiết bị này có hai chế độ hoạt động: chế độ lấy mẫu và chế độ chốt. Chế độ lấy mẫu tương ứng với trạng thái đóng của phím S.W. . Ở chế độ này, điện áp đầu ra của UVH lặp lại điện áp đầu vào. Chế độ chốt được kích hoạt bằng lệnh từ phím mở S.W. . Trong trường hợp này, kết nối giữa đầu vào và đầu ra của UVH bị gián đoạn và tín hiệu đầu ra được duy trì ở mức không đổi tương ứng với mức tín hiệu đầu vào tại thời điểm nhận được lệnh cố định do điện tích tích lũy trên tụ điện. Do đó, nếu lệnh giữ được đưa ra ngay trước khi bắt đầu chuyển đổi ADC, tín hiệu đầu ra của UVH sẽ được duy trì ở mức không đổi trong toàn bộ thời gian chuyển đổi. Sau khi quá trình chuyển đổi hoàn tất, UVH lại được chuyển sang chế độ lấy mẫu. Hoạt động của UVH thực tế hơi khác so với trường hợp lý tưởng đã được mô tả (Hình 3.12).
 |
![]() (3.21),
(3.21),
ở đâu – tần số của tín hiệu đầu vào, t A – giá trị độ không đảm bảo đo của khẩu độ.
Trong UVH thực, tín hiệu đầu ra không thể không thay đổi hoàn toàn trong thời gian chuyển đổi hữu hạn. Tụ điện sẽ được phóng điện dần dần bởi dòng điện đầu vào nhỏ của bộ đệm đầu ra. Để duy trì độ chính xác cần thiết, điều cần thiết là trong quá trình chuyển đổi, điện tích của tụ điện không thay đổi quá 0,5 bạn LSB.
Bộ chuyển đổi kỹ thuật số sang tương tự thường được cài đặt ở đầu ra của hệ thống vi xử lý để chuyển đổi mã đầu ra của nó thành tín hiệu tương tự cung cấp cho đối tượng điều khiển liên tục. Đặc tính tĩnh lý tưởng của DAC 3 bit được thể hiện trong hình 3.13.
 |
Điểm khởi đầu đặc trưng được xác định là điểm tương ứng với mã đầu vào (không) đầu tiên Bạn 00…0 . Đặc điểm điểm cuốiđược xác định là điểm tương ứng với mã đầu vào cuối cùng Bạn 11…1 . Các định nghĩa về dải điện áp đầu ra, bit có ý nghĩa nhỏ nhất của đơn vị lượng tử hóa, lỗi bù 0 và lỗi hệ số chuyển đổi tương tự như các đặc tính tương ứng của ADC.
Từ quan điểm của tổ chức cấu trúc, DAC có ít lựa chọn hơn để xây dựng bộ chuyển đổi. Cấu trúc chính của DAC được gọi là. "xích Sơ đồ R -2 R” (Hình 3.14).

Dễ dàng chứng minh được dòng điện vào của mạch là Tôi vào = U REF / R và dòng điện của các mắt xích liên tiếp trong chuỗi lần lượt là Tôi ở /2, tôi ở /4, tôi ở /8 v.v. Để chuyển đổi mã kỹ thuật số đầu vào thành dòng điện đầu ra, chỉ cần thu thập tất cả các dòng điện của nhánh tương ứng với các dòng trong mã đầu vào tại điểm đầu ra của bộ chuyển đổi là đủ (Hình 3.15).
 |
Nếu bộ khuếch đại hoạt động được kết nối với điểm đầu ra của bộ chuyển đổi thì điện áp đầu ra có thể được xác định là
![]() (3.22),
(3.22),
ở đâu K – nhập mã kỹ thuật số, N – Độ sâu bit DAC.
Tất cả các DAC hiện có được chia thành hai nhóm lớn: DAC có đầu ra dòng điện và DAC có đầu ra điện áp. Sự khác biệt giữa chúng nằm ở chỗ không có hoặc có sự hiện diện của tầng cuối cùng trên bộ khuếch đại hoạt động trong chip DAC. DAC có đầu ra điện áp là thiết bị hoàn thiện hơn và cần ít thành phần bổ sung hơn để hoạt động. Tuy nhiên, giai đoạn cuối cùng cùng với các thông số của mạch lâm nghiệp sẽ xác định các thông số động và độ chính xác của DAC. Việc triển khai bộ khuếch đại hoạt động tốc độ cao, chính xác trên cùng một con chip với DAC thường rất khó khăn. Do đó, hầu hết các DAC tốc độ cao đều có đầu ra dòng điện.
Phi tuyến vi saiđối với DAC được định nghĩa là độ lệch khoảng cách giữa hai mức liền kề của tín hiệu tương tự đầu ra so với giá trị lý tưởng U LSB . Một giá trị lớn của độ phi tuyến vi sai có thể làm cho DAC trở nên không đơn điệu. Điều này có nghĩa là việc tăng mã kỹ thuật số sẽ dẫn đến giảm tín hiệu đầu ra ở một phần đặc tính nào đó (Hình 3.16). Điều này có thể dẫn đến sự phát sinh không mong muốn trong hệ thống.
 |
Tính phi tuyến tích phân đối với DAC, được định nghĩa là độ lệch lớn nhất của mức tín hiệu đầu ra analog so với đường thẳng vẽ qua các điểm tương ứng với mã đầu tiên và mã cuối cùng sau khi chúng được điều chỉnh.
Cài đặt thời gian DAC được định nghĩa là thời gian mà tín hiệu đầu ra DAC sẽ được thiết lập ở một mức nhất định với sai số không quá 0,5 U LSB sau khi mã đầu vào thay đổi từ giá trị 00...0 thành giá trị 11...1. Nếu DAC có các thanh ghi đầu vào thì một phần thời gian xử lý nhất định là do độ trễ cố định khi truyền tín hiệu số và chỉ phần còn lại là do quán tính của chính mạch DAC. Do đó, thời gian xử lý thường được đo không phải từ thời điểm mã mới đến đầu vào DAC mà từ thời điểm tín hiệu đầu ra bắt đầu thay đổi, tương ứng với mã mới, cho đến khi tín hiệu đầu ra được thiết lập chính xác. LSB 0,5U (Hình 3.17).
 |
Trong trường hợp này, thời gian xử lý xác định tần số lấy mẫu tối đa của DAC
(3.23),
ở đâu t S - thời gian thành lập.
Các mạch kỹ thuật số đầu vào của DAC có tốc độ hữu hạn. Ngoài ra, tốc độ truyền tín hiệu tương ứng với các bit khác nhau của mã đầu vào cũng không giống nhau do sự thay đổi tham số của các phần tử và đặc tính của mạch. Kết quả là, các nhánh của mạch bậc thang DAC không chuyển đổi đồng bộ khi có mã mới đến mà có một số độ trễ tương đối với nhau. Điều này dẫn đến thực tế là trong sơ đồ điện áp đầu ra của DAC, khi chuyển từ giá trị trạng thái ổn định này sang giá trị trạng thái ổn định khác, người ta quan sát thấy các xung có biên độ và hướng khác nhau (Hình 3.18).
 |
 |
Theo thuật toán vận hành, DAC là bộ ngoại suy bậc 0, đáp ứng tần số của nó có thể được biểu thị bằng biểu thức
 (3.24),
(3.24),
Ở đâu w S - tần số lấy mẫu. Đáp ứng biên độ-tần số của DAC được thể hiện trong hình 3.20.
 |
Có thể thấy, ở tần số 0,5w S tín hiệu được tái tạo bị suy giảm 3,92 dB so với các thành phần tần số thấp của tín hiệu. Do đó, có một chút biến dạng phổ của tín hiệu được tái tạo. Trong hầu hết các trường hợp, sự biến dạng nhỏ này không ảnh hưởng đáng kể đến hiệu suất hệ thống. Tuy nhiên, trong trường hợp cần tăng độ tuyến tính của các đặc tính phổ của hệ thống (ví dụ: trong hệ thống xử lý âm thanh), để cân bằng phổ thu được ở đầu ra DAC, cần phải cài đặt bộ lọc phục hồi đặc biệt có đáp ứng tần số là loại x/sin(x).
ĐẮC– bộ chuyển đổi số sang tương tự – thiết bị được thiết kế để chuyển đổi tín hiệu rời rạc (kỹ thuật số) thành tín hiệu liên tục (tương tự). Việc chuyển đổi được thực hiện tương ứng với mã nhị phân của tín hiệu.
Phân loại DAC
Theo loại tín hiệu đầu ra: với đầu ra dòng điện và điện áp đầu ra;
Theo loại giao diện kỹ thuật số: với đầu vào nối tiếp và với đầu vào song song của mã đầu vào;
Theo số lượng DAC trên chip: đơn kênh và đa kênh;
Theo tốc độ: tốc độ vừa phải và tốc độ cao.
Thông số DAC cơ bản:
1. N – độ sâu bit.
2. Dòng điện đầu ra tối đa.
4. Độ lớn của điện áp tham chiếu.
5. Độ phân giải.
6. Kiểm soát các mức điện áp (TTL hoặc CMOS).
7. Lỗi chuyển đổi (lỗi bù 0 đầu ra, lỗi chuyển đổi tuyệt đối, phi tuyến chuyển đổi, phi tuyến vi sai). 8. Thời gian chuyển đổi – khoảng thời gian từ thời điểm mã được trình bày (gửi) đến thời điểm tín hiệu đầu ra xuất hiện.
9. Thời gian xử lý tín hiệu analog
Các thành phần chính của DAC là:
Ma trận điện trở (một tập hợp các bộ chia có TCR nhất định, có độ lệch nhất định 2%, 5% trở xuống) có thể được tích hợp vào IC;
Công tắc (trên bóng bán dẫn lưỡng cực hoặc MOS);
Nguồn điện áp tham chiếu
Các mạch cơ bản để xây dựng một DAC.

21. ADC. Các quy định chung. Tần số lấy mẫu. Phân loại ADC. Nguyên lý hoạt động của ADC song song.
Theo tốc độ hoạt động, ADC được chia thành:
1. ADC chuyển đổi song song (ADC song song) - ADC tốc độ cao, sử dụng phần cứng phức tạp theo đơn vị GHz.độ phân giải N = 8-12 bit, Fg = hàng chục MHz
2. ADC xấp xỉ liên tiếp (đếm liên tiếp) lên tới 10 MHz. độ phân giải N = 10-16 bit, Fg = hàng chục kHz
3. Tích hợp ADC hàng trăm Hz.độ phân giải N = 16-24 bit, Fg = hàng chục
4. Đơn vị ADC Sigma-delta MHz.độ phân giải N = 16-24 bit, Fg = hàng trăm Hz

22. ADC đếm nối tiếp. Nguyên lý hoạt động.
23. ADC của các phép tính gần đúng liên tiếp. Nguyên lý hoạt động.

 Mã này từ đầu ra của RPP được đưa đến DAC, tạo ra điện áp tương ứng 3/4Uinmax, được so sánh với Uin (trên CC) và kết quả được ghi vào cùng một bit với xung đồng hồ thứ tư. Quá trình sau đó tiếp tục cho đến khi tất cả các chữ số đã được phân tích.
Mã này từ đầu ra của RPP được đưa đến DAC, tạo ra điện áp tương ứng 3/4Uinmax, được so sánh với Uin (trên CC) và kết quả được ghi vào cùng một bit với xung đồng hồ thứ tư. Quá trình sau đó tiếp tục cho đến khi tất cả các chữ số đã được phân tích.
Thời gian chuyển đổi SAR ADC:
tpr = 2nTG, trong đó TG là chu kỳ lặp xung của máy phát; n – dung lượng bit ADC.
Những ADC như vậy có tốc độ kém hơn các ADC loại song song nhưng chúng rẻ hơn và tiêu thụ ít điện năng hơn. Ví dụ: 1113PV1.
24. Nguyên lý hoạt động của ADC loại tích hợp.
Nguyên lý hoạt động của ADC tích hợp dựa trên hai nguyên tắc cơ bản:
1. Chuyển đổi điện áp đầu vào thành tần số hoặc thời lượng xung (thời gian)
Uin → f (VLF – bộ biến đổi điện áp-tần số)
2. Chuyển đổi tần số hoặc thời lượng (thời gian) sang mã số
f → N; T→N.
Lỗi chính là do VLF gây ra.
Loại ADC này thực hiện chuyển đổi theo hai giai đoạn.
Trong giai đoạn đầu tiên, tín hiệu analog đầu vào được tích hợp và giá trị tích hợp này được chuyển đổi thành chuỗi xung. Tốc độ lặp lại của các xung trong chuỗi này hoặc khoảng thời gian của chúng được điều chế bằng giá trị tích hợp của tín hiệu đầu vào.
Ở giai đoạn thứ hai, chuỗi xung này được chuyển đổi thành mã kỹ thuật số - tần số hoặc thời lượng xung của nó được đo.
). Bộ chuyển đổi kỹ thuật số sang tương tự là giao diện giữa thế giới kỹ thuật số rời rạc và tín hiệu tương tự.
Ứng dụng
Đặc trưng
Để mô tả các bộ chuyển đổi kỹ thuật số sang tương tự, các đặc điểm sau thường được sử dụng.
Đặc tính tĩnh:
- Độ sâu bit. Xác định số mức tín hiệu tương tự mà DAC có thể tái tạo. Vì N bit DAC số mức tín hiệu analog là 2 N(bao gồm giá trị cho mã 0);
- Đặc tính tĩnh của phép biến đổi. Đây là biểu đồ trong đó các giá trị mã được vẽ trên trục hoành độ và các giá trị của tín hiệu đầu ra DAC được vẽ trên trục tọa độ.
- Tính phi tuyến tĩnh. Để mô tả tính phi tuyến tĩnh, hai đại lượng được sử dụng: phi tuyến vi sai (DNL) và phi tuyến tích phân (INL);
- Sự đơn điệu. Một trong những đặc điểm quan trọng nhất của DAC, cho thấy rằng khi mã tăng lên thì giá trị của tín hiệu analog cũng tăng lên. Kiến trúc đơn nhất đảm bảo sự đơn điệu. Đối với kiến trúc nhị phân, tính đơn điệu không được đảm bảo;
- Cung cấp hiệu điện thế;
- Sự tiêu thụ năng lượng;
- Không bù đắp;
- Đạt được lỗi;
Đặc tính động:
Kiến trúc DAC là một cách tạo ra tín hiệu đầu ra ở mức chức năng. Nói cách khác, đây là mô tả về tổng các số mà giá trị của tín hiệu đầu ra sẽ được phân tách thành. Tín hiệu đầu ra được tạo ra bằng cách sử dụng các phần tử cân, mỗi phần tử chịu trách nhiệm về “phần” tín hiệu đầu ra riêng. Các kiến trúc sau được phân biệt dựa trên tập hợp các giá trị của các phần tử cân:
- Kiến trúc nhị phân;
Tỷ lệ của hai phần tử cân liền kề là 2. Nghĩa là, tín hiệu đầu ra được tạo ra giống như cách xảy ra trong hệ thống số nhị phân. Theo đó, trọng số của các phần tử tạo thành tín hiệu đầu ra ở dạng chuẩn hóa sẽ bằng 1, 2, 4, 8, 16, v.v. Các phần tử cân được điều khiển bằng mã nhị phân.
- Kiến trúc đơn nhất;
Tỷ lệ của hai phần tử cân liền kề là 1. Nghĩa là, tín hiệu đầu ra được tạo ra giống như cách xảy ra trong hệ thống số đơn phân. Theo đó, trọng số của tất cả các phần tử, ở dạng chuẩn hóa, bằng 1. Việc kiểm soát được thực hiện bằng mã đơn nhất hoặc mã đơn nhất.
- Kiến trúc Fibonacci;
Trọng số của phần tử là một dãy số Fibonacci. Tín hiệu đầu ra được tạo ra giống như cách xảy ra trong hệ thống số Fibonacci.
Ngoài ra còn có khái niệm kiến trúc phân khúc, bao gồm việc chia mã đầu vào thành nhiều nhóm. Theo quy định, hai. Mỗi nhóm được xử lý độc lập bởi phân khúc của nó. Đầu ra của tất cả các phân đoạn được kết hợp để tạo thành đầu ra DAC. Cấu hình phổ biến nhất của kiến trúc phân đoạn là như sau: các bit thứ tự thấp được xử lý bởi một phân đoạn được xây dựng trên kiến trúc nhị phân, các bit thứ tự cao được xử lý bởi một phân đoạn được xây dựng trên kiến trúc đơn nhất.
Các loại phần tử cân và phương pháp tạo khối lượng
Bộ chuyển đổi kỹ thuật số sang tương tự, bất kể kiến trúc, có thể sử dụng các loại thành phần sau làm phần tử cân tín hiệu tương tự: tụ điện, điện trở và nguồn dòng điện.
- Tụ điện. Loại phần tử cân này, khi được sử dụng trong kiến trúc nhị phân, có thể có xếp hạng khác nhau theo hệ số 2 giữa các phần tử lân cận hoặc có xếp hạng 1 và 2 và tạo thành chuỗi thang C-2C.
- Điện trở. Loại phần tử cân này có nguyên lý cấu tạo giống như tụ điện. Ngoài ra, còn có việc triển khai các cấu trúc tương tự không dựa trên điện trở mà dựa trên các bóng bán dẫn đóng vai trò là điện trở. Những chuỗi như vậy được gọi là M-2M.
- Các nguồn hiện tại. Đây thường là một bóng bán dẫn ở chế độ bão hòa. Việc sử dụng các loại phần tử cân này giúp loại bỏ nhu cầu về bộ đệm cần thiết cho các loại phần tử cân khác.
Để hình thành khối lượng của phần tử cân, có các phương pháp sau:
- Quy mô của các giáo phái. Từ góc độ công nghệ bán dẫn, điều này luôn tương đương với việc mở rộng kích thước tính năng;
- Sử dụng cấu trúc bậc thang. Chỉ áp dụng cho các phần tử cân điện dung và điện trở. Tùy thuộc vào loại phần tử cân, các cấu trúc như vậy được gọi là R-2R, C-2C hoặc M-2M (bóng bán dẫn được sử dụng thay cho điện trở);
- Nạp điện vào cổng nổi. Chỉ áp dụng cho các công nghệ đặc biệt liên quan đến việc hình thành cổng nổi trên bóng bán dẫn. Theo quy định, đây là những công nghệ dành cho việc sản xuất bộ nhớ cố định.
DAC nối tiếp và song song
Tùy thuộc vào phương pháp xử lý các bit của mã đầu vào, DAC được chia thành hai loại: nối tiếp và song song. Các loại sau đây có thể được phân loại là DAC nối tiếp:
- Bộ điều biến độ rộng xung- loại DAC đơn giản nhất. Một nguồn dòng điện hoặc điện áp ổn định được bật định kỳ trong một khoảng thời gian tỷ lệ thuận với mã kỹ thuật số được chuyển đổi, sau đó chuỗi xung thu được được lọc bằng bộ lọc thông thấp tương tự. Phương pháp này thường được sử dụng để điều khiển tốc độ của động cơ điện và cũng đang trở nên phổ biến trong các thiết bị âm thanh Hi-Fi;
- DAC quá mức, chẳng hạn như DAC delta-sigma, dựa trên mật độ xung thay đổi.
Bộ Giáo dục và Khoa học Ukraina
Học viện Hàng hải Quốc gia Odessa
Khoa Điện tử Hàng hải
trong môn học “Hệ thống thu thập và xử lý thông tin từ xa”
"Bộ chuyển đổi kỹ thuật số sang tương tự"
Hoàn thành:
tập hợp FEM và RE
nhóm 3131
Strukov S.M.
Đã kiểm tra: Nghệ thuật. giáo viên
Kudelkin I.N.
Odessa – 2007
1. Giới thiệu
2. Thông tin chung
3. DAC nối tiếp
4. DAC song song
5. Ứng dụng DAC
6. Thông số DAC
7. Danh sách tài liệu tham khảo
GIỚI THIỆU
Những thập kỷ gần đây là do sự phổ biến rộng rãi của công nghệ vi điện tử và máy tính vào nền kinh tế quốc dân, việc trao đổi thông tin được đảm bảo bởi các bộ chuyển đổi tương tự và kỹ thuật số tuyến tính (ADC và DAC).
Giai đoạn hiện đại được đặc trưng bởi các mạch tích hợp DAC và ADC lớn và cực lớn với các thông số hiệu suất cao: tốc độ, lỗi nhỏ, nhiều bit. Việc đưa LSI DAC và ADC thành một đơn vị hoàn chỉnh về chức năng đã đơn giản hóa đáng kể việc triển khai chúng trong các thiết bị và hệ thống lắp đặt được sử dụng cả trong nghiên cứu khoa học và trong công nghiệp, đồng thời giúp có thể trao đổi thông tin nhanh chóng giữa các thiết bị analog và kỹ thuật số.
Thông tin chung
Bộ chuyển đổi kỹ thuật số sang tương tự (DAC) được thiết kế để chuyển đổi một số, thường được định nghĩa là mã nhị phân, thành điện áp hoặc dòng điện tỷ lệ thuận với giá trị của mã kỹ thuật số. Mạch của bộ chuyển đổi tín hiệu số sang tín hiệu tương tự rất đa dạng. Trong bộ lễ phục. Hình 1 cho thấy sơ đồ phân loại của DAC theo đặc điểm mạch. Ngoài ra, IC của bộ chuyển đổi tín hiệu số sang tín hiệu tương tự được phân loại theo các tiêu chí sau:
o Theo loại tín hiệu đầu ra: có đầu ra dòng điện và đầu ra điện áp.
o Theo loại giao diện kỹ thuật số: với đầu vào nối tiếp và đầu vào song song của mã đầu vào.
o Theo số lượng DAC trên chip: đơn kênh và đa kênh.
o Theo tốc độ: tốc độ vừa phải và cao.
Cơm. 1. Phân loại DAC
DAC nối tiếp
DAC điều chế độ rộng xung
Thông thường, DAC là một phần của hệ thống vi xử lý. Trong trường hợp này, nếu không cần tốc độ cao, việc chuyển đổi kỹ thuật số sang tương tự có thể được thực hiện rất dễ dàng bằng cách sử dụng điều chế độ rộng xung (PWM). Mạch DAC với xung điện xung được hiển thị trong hình. 1a.

Cơm. 1. DAC có điều chế độ rộng xung
Chuyển đổi kỹ thuật số sang tương tự được tổ chức đơn giản nhất nếu bộ vi điều khiển có chức năng chuyển đổi độ rộng xung tích hợp (ví dụ: AT90S8515 từ Atmel hoặc 87C51GB từ Intel). Đầu ra xung điều khiển công tắc S. Tùy thuộc vào độ sâu bit chuyển đổi được chỉ định (đối với bộ điều khiển AT90S8515, có thể sử dụng các chế độ 8, 9 và 10 bit), bộ điều khiển, sử dụng bộ đếm thời gian/bộ đếm của nó, tạo ra một chuỗi xung, khoảng thời gian tương đối trong đó g = t Và / Tđược xác định bởi mối quan hệ
Ở đâu N- độ sâu bit chuyển đổi, và D- mã được chuyển đổi. Bộ lọc thông thấp làm mịn các xung, làm nổi bật giá trị điện áp trung bình. Kết quả là điện áp đầu ra của bộ chuyển đổi

Mạch được xem xét cung cấp độ tuyến tính gần như lý tưởng của quá trình chuyển đổi và không chứa các phần tử chính xác (ngoại trừ nguồn điện áp tham chiếu). Hạn chế chính của nó là hiệu suất thấp.
DAC tụ chuyển mạch nối tiếp
Mạch DAC DAC được thảo luận ở trên trước tiên chuyển đổi mã kỹ thuật số thành một khoảng thời gian, được tạo ra bằng cách sử dụng lượng tử truy cập nhị phân theo lượng tử, do đó để thu được N- Yêu cầu chuyển đổi 2 bit N lượng tử thời gian (chu kỳ). Mạch DAC nối tiếp được hiển thị trong Hình. 2 cho phép thực hiện chuyển đổi kỹ thuật số sang tương tự với chu kỳ xung nhịp ít hơn đáng kể.

Trong mạch này, điện dung của tụ điện là VỚI 1 và VỚI 2 đều bằng nhau. Trước khi chu kỳ chuyển đổi bắt đầu, tụ điện VỚI 2 được xả bằng chìa khóa S 4 . Từ nhị phân đầu vào được chỉ định dưới dạng mã nối tiếp. Việc chuyển đổi của nó được thực hiện tuần tự, bắt đầu từ chữ số có nghĩa nhỏ nhất d 0 . Mỗi chu kỳ chuyển đổi bao gồm hai nửa chu kỳ. Trong nửa chu kỳ đầu tụ điện VỚI 1 lần sạc vào điện áp tham chiếu bạn làm việc tại d 0 = 1 bằng cách đóng phím S 1 hoặc xả về 0 tại d 0 = 0 bằng cách đóng phím S 2. Trong nửa chu kỳ thứ hai với các phím mở S 1 ,S 2 và S 4 phím đóng S 3, làm cho điện tích chia đôi giữa VỚI 1 và VỚI 2. Kết quả là chúng tôi nhận được
bạn 1 (0)=bạn ra (0)=( d 0 /2)bạn op
Khi ở trên tụ điện VỚI 2 lần sạc được duy trì, quy trình sạc tụ điện VỚI 1 phải được lặp lại cho chữ số tiếp theo d 1 từ đầu vào. Sau một chu kỳ nạp điện mới, điện áp trên tụ sẽ là
Việc chuyển đổi được thực hiện theo cách tương tự đối với các bit còn lại của từ. Kết quả là cho N-bit DAC điện áp đầu ra sẽ bằng
Nếu bạn muốn lưu kết quả chuyển đổi trong thời gian dài, bạn nên kết nối UVH với đầu ra của mạch. Sau khi kết thúc chu kỳ chuyển đổi, bạn nên thực hiện chu trình lấy mẫu, chuyển UVH sang chế độ lưu trữ và bắt đầu lại quá trình chuyển đổi.
Do đó, mạch được trình bày sẽ biến đổi mã đầu vào thành 2 N lượng tử, ít hơn đáng kể so với lượng tử của DAC DAC. Ở đây chỉ cần hai tụ điện nhỏ phù hợp. Cấu hình phần tương tự của mạch không phụ thuộc vào độ sâu bit của mã được chuyển đổi. Tuy nhiên, về mặt hiệu suất, DAC nối tiếp kém hơn đáng kể so với các bộ chuyển đổi kỹ thuật số sang tương tự song song, điều này làm hạn chế phạm vi ứng dụng của nó.
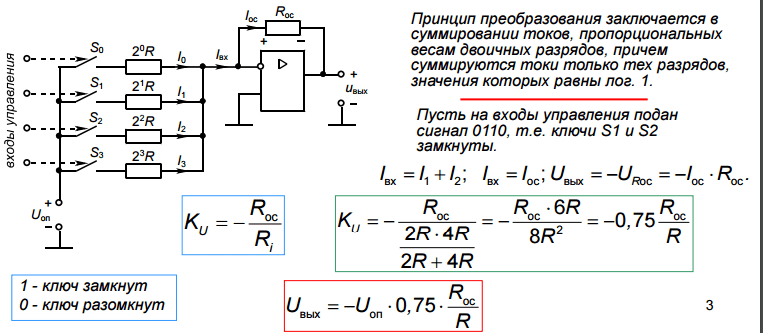
Hầu hết các mạch DAC song song đều dựa trên tổng của các dòng điện, cường độ của mỗi dòng tỷ lệ thuận với trọng lượng của bit nhị phân kỹ thuật số và chỉ nên tính tổng các dòng bit có giá trị bằng 1. Ví dụ: giả sử bạn muốn. để chuyển đổi mã nhị phân 4 bit thành tín hiệu dòng điện tương tự. Trọng số của chữ số thứ tư, chữ số có ý nghĩa nhất (MSD) sẽ là 2 3 =8, chữ số thứ ba - 2 2 =4, chữ số thứ hai - 2 1 =2 và chữ số ít ý nghĩa nhất (LSB) - 2 0 =1. Nếu trọng lượng của SZR I MZR = 1 mA thì I SZR = 8 mA và dòng điện đầu ra tối đa của bộ chuyển đổi I out.max = 15 mA và tương ứng với mã 1111 2. Rõ ràng là mã 1001 2 chẳng hạn sẽ tương ứng với I out = 9 mA, v.v. Do đó, cần phải xây dựng một mạch đảm bảo việc tạo và chuyển đổi dòng điện cân chính xác theo các định luật đã cho. Mạch đơn giản nhất thực hiện nguyên tắc này được thể hiện trong hình. 3.
Điện trở của các điện trở được chọn sao cho khi đóng các công tắc, một dòng điện tương ứng với trọng lượng phóng điện sẽ chạy qua chúng. Khóa phải được đóng khi bit tương ứng của từ đầu vào bằng một. Dòng điện đầu ra được xác định bởi mối quan hệ

Với dung lượng bit cao của DAC, các điện trở cài đặt dòng điện phải được kết hợp với độ chính xác cao. Các yêu cầu về độ chính xác nghiêm ngặt nhất được áp dụng cho các điện trở có chữ số cao nhất, vì độ phân tán dòng điện trong chúng không được vượt quá dòng điện của chữ số bậc thấp. Do đó, độ phân tán điện trở ở lần phóng điện thứ k phải nhỏ hơn
Từ điều kiện này, suy ra rằng độ rộng của điện trở, ví dụ, ở chữ số thứ tư không được vượt quá 3% và ở chữ số thứ 10 - 0,05%, v.v.
Sơ đồ được xem xét, vì tất cả sự đơn giản của nó, có rất nhiều nhược điểm. Thứ nhất, đối với các mã đầu vào khác nhau, dòng điện tiêu thụ từ nguồn điện áp tham chiếu (RPS) sẽ khác nhau và điều này sẽ ảnh hưởng đến giá trị của điện áp đầu ra RES. Thứ hai, giá trị điện trở của các điện trở trọng lượng có thể khác nhau hàng nghìn lần và điều này khiến việc triển khai các điện trở này trong IC bán dẫn trở nên rất khó khăn. Ngoài ra, điện trở của các điện trở bậc cao trong DAC nhiều bit có thể tương đương với điện trở của công tắc đóng và điều này sẽ dẫn đến lỗi chuyển đổi. Thứ ba, trong mạch này, điện áp đáng kể được đặt vào các công tắc mở, điều này làm phức tạp việc xây dựng chúng.
Những thiếu sót này đã được loại bỏ trong mạch DAC AD7520 (tương tự trong nước 572PA1), được phát triển bởi Analog Devices vào năm 1973, hiện đã trở thành tiêu chuẩn công nghiệp về cơ bản (nhiều mẫu DAC nối tiếp được sản xuất theo nó). Sơ đồ được chỉ định được hiển thị trong Hình. 4. Ở đây sử dụng bóng bán dẫn MOS làm công tắc.

Bộ chuyển đổi analog sang kỹ thuật số(ADC, tiếng Anh Analog-to-digital Converter, ADC) là thiết bị chuyển đổi tín hiệu analog đầu vào thành mã rời rạc (tín hiệu số). Việc chuyển đổi ngược lại được thực hiện bằng cách sử dụng DAC (Bộ chuyển đổi kỹ thuật số sang tương tự, DAC).
Thông thường, ADC là một thiết bị điện tử chuyển đổi điện áp thành mã kỹ thuật số nhị phân. Tuy nhiên, một số thiết bị phi điện tử có đầu ra kỹ thuật số cũng nên được phân loại là ADC, chẳng hạn như một số loại bộ chuyển đổi góc sang mã. ADC nhị phân một bit đơn giản nhất là bộ so sánh.
Sự cho phép
Độ phân giải của ADC—sự thay đổi tối thiểu về cường độ của tín hiệu tương tự có thể được chuyển đổi bởi một ADC nhất định—có liên quan đến dung lượng bit của nó. Trong trường hợp phép đo đơn lẻ không tính đến nhiễu, độ phân giải được xác định trực tiếp bởi dung lượng bit của ADC.
Công suất ADC đặc trưng cho số lượng giá trị riêng biệt mà bộ chuyển đổi có thể tạo ra ở đầu ra. Trong ADC nhị phân, nó được đo bằng bit, trong ADC bậc ba, nó được đo bằng trit. Ví dụ: ADC 8 bit nhị phân có khả năng tạo ra 256 giá trị rời rạc (0...255), vì , ADC 8 bit nhị phân có khả năng tạo ra 6561 giá trị rời rạc, vì .
Độ phân giải điện áp bằng chênh lệch giữa các điện áp tương ứng với mã đầu ra tối đa và tối thiểu, chia cho số giá trị rời rạc đầu ra. Ví dụ:
Phạm vi đầu vào = 0 đến 10 volt
Dung lượng ADC nhị phân 12 bit: 212 = 4096 mức lượng tử hóa
Độ phân giải điện áp ADC nhị phân: (10-0)/4096 = 0,00244 volt = 2,44 mV
Dung lượng bit của ADC 3 trit bậc 3: 312 = 531.441 mức lượng tử hóa
Độ phân giải điện áp ADC bậc ba: (10-0)/531441 = 0,0188 mV = 18,8 µV
Dải đầu vào = −10 đến +10 volt
Dung lượng ADC nhị phân 14 bit: 214 = 16384 mức lượng tử hóa
Độ phân giải điện áp ADC nhị phân: (10-(-10))/16384 = 20/16384 = 0,00122 volt = 1,22 mV
Dung lượng bit của ADC 14 trit bậc ba: 314 = 4.782.969 mức lượng tử hóa
Độ phân giải điện áp ADC bậc ba: (10-(-10))/4782969 = 0,00418 mV = 4,18 µV
Trong thực tế, độ phân giải của ADC bị giới hạn bởi tỷ lệ tín hiệu trên tạp âm của tín hiệu đầu vào. Khi cường độ nhiễu ở đầu vào ADC cao, việc phân biệt giữa các mức tín hiệu đầu vào liền kề trở nên không thể, nghĩa là độ phân giải bị giảm sút. Trong trường hợp này, độ phân giải thực tế có thể đạt được được mô tả bằng số bit hiệu dụng (ENOB), nhỏ hơn dung lượng bit thực tế của ADC. Khi chuyển đổi tín hiệu có độ nhiễu cao, các bit bậc thấp của mã đầu ra thực tế vô dụng vì chúng chứa nhiễu. Để đạt được độ sâu bit được khai báo, tỷ lệ S/N của tín hiệu đầu vào phải xấp xỉ 6 dB cho mỗi bit có độ sâu bit (6 dB tương ứng với sự thay đổi gấp bốn lần về mức tín hiệu).
Các loại chuyển đổi
Theo phương pháp thuật toán được sử dụng, ADC được chia thành:
Tìm kiếm trực tiếp tuần tự
Xấp xỉ liên tiếp
Nối tiếp với điều chế sigma-delta
Giai đoạn đơn song song
Song song hai hoặc nhiều giai đoạn (băng tải)
Đặc tính truyền của ADC là sự phụ thuộc của số tương đương của mã nhị phân đầu ra vào độ lớn của tín hiệu tương tự đầu vào. Họ nói về ADC tuyến tính và phi tuyến. Sự phân chia này có điều kiện. Cả hai đặc tính truyền động đều được bước. Nhưng đối với các ADC “tuyến tính”, luôn có thể vẽ một đường thẳng sao cho tất cả các điểm của đặc tính truyền tương ứng với các giá trị đầu vào delta*2^k (trong đó delta là bước lấy mẫu, k nằm trong phạm vi 0. .N, trong đó N là độ sâu bit ADC) cách đều nó.
Sự chính xác
Có một số nguồn gây ra lỗi ADC. Các lỗi lượng tử hóa và tính phi tuyến (giả sử rằng ADC phải tuyến tính) vốn có trong bất kỳ chuyển đổi tương tự sang số nào. Ngoài ra, còn có những lỗi được gọi là lỗi khẩu độ do hiện tượng jitter của bộ tạo xung nhịp; chúng xuất hiện khi chuyển đổi toàn bộ tín hiệu (chứ không chỉ một mẫu).
Những lỗi này được đo bằng đơn vị gọi là LSB - bit ít quan trọng nhất. Trong ví dụ trên về ADC nhị phân 8 bit, sai số trong 1 LSB là 1/256 của toàn dải tín hiệu, tức là 0,4%, trong ADC 3 ngôi 5 trit, sai số trong 1 LSB là 1/243 của phạm vi tín hiệu đầy đủ, nghĩa là 0,412%, trong ADC ternary 8 trite, sai số trong 1 LSB là 1/6561, nghĩa là 0,015%.
Các loại ADC
Sau đây là các phương pháp chính để xây dựng ADC điện tử:
ADC chuyển đổi trực tiếp:
Các ADC chuyển đổi trực tiếp song song, là các ADC song song hoàn toàn, chứa một bộ so sánh cho mỗi mức tín hiệu đầu vào riêng biệt. Tại bất kỳ thời điểm nào, chỉ các bộ so sánh tương ứng với các mức dưới mức tín hiệu đầu vào mới tạo ra tín hiệu vượt mức ở đầu ra của chúng. Tín hiệu từ tất cả các bộ so sánh đi trực tiếp đến một thanh ghi song song, sau đó mã được xử lý trong phần mềm hoặc đến bộ mã hóa logic phần cứng, tạo ra mã kỹ thuật số cần thiết trong phần cứng tùy thuộc vào mã ở đầu vào bộ mã hóa. Dữ liệu từ bộ mã hóa được ghi vào một thanh ghi song song. Nói chung, tốc độ lấy mẫu của các ADC song song phụ thuộc vào đặc điểm phần cứng của các phần tử logic và tương tự, cũng như tốc độ lấy mẫu được yêu cầu.
ADC chuyển đổi trực tiếp song song là nhanh nhất nhưng thường có độ phân giải không quá 8 bit vì chúng đòi hỏi chi phí phần cứng lớn (bộ so sánh). ADC loại này có kích thước chip rất lớn, điện dung đầu vào cao và có thể tạo ra các lỗi ngắn hạn ở đầu ra. Thường được sử dụng cho video hoặc các tín hiệu tần số cao khác, chúng cũng được sử dụng rộng rãi trong công nghiệp để giám sát các quá trình thay đổi nhanh chóng trong thời gian thực.
Hoạt động đường ống của ADC được sử dụng trong các ADC chuyển đổi trực tiếp nối tiếp song song, trái ngược với chế độ hoạt động thông thường của các ADC chuyển đổi trực tiếp nối tiếp song song, trong đó dữ liệu được truyền sau khi chuyển đổi hoàn toàn trong vận hành đường ống, dữ liệu chuyển đổi một phần được truyền đi; được truyền đi khi chúng đã sẵn sàng cho đến khi kết thúc quá trình chuyển đổi hoàn toàn.
ADC xấp xỉ liên tiếp, hoặc ADC cân bằng bit, chứa bộ so sánh, DAC phụ trợ và thanh ghi xấp xỉ liên tiếp. ADC chuyển đổi tín hiệu tương tự thành tín hiệu số theo N bước, trong đó N là độ sâu bit ADC. Ở mỗi bước, một bit của giá trị số mong muốn được xác định, bắt đầu từ SZR và kết thúc bằng LZR. Trình tự các hành động để xác định bit tiếp theo như sau. DAC phụ được đặt thành giá trị tương tự được hình thành từ các bit đã được xác định ở các bước trước; bit phải xác định ở bước này được đặt thành 1, các bit thấp hơn được đặt thành 0. Giá trị thu được tại DAC phụ được so sánh với giá trị analog đầu vào. Nếu giá trị của tín hiệu đầu vào lớn hơn giá trị trên DAC phụ thì bit cần xác định sẽ nhận giá trị 1, nếu không thì 0. Do đó, việc xác định giá trị kỹ thuật số cuối cùng giống như tìm kiếm nhị phân. Loại ADC này vừa có tốc độ cao vừa có độ phân giải tốt. Tuy nhiên, trong trường hợp không có thiết bị lấy mẫu lưu trữ thì sai số sẽ lớn hơn rất nhiều (hãy tưởng tượng rằng sau khi chữ số lớn nhất được số hóa, tín hiệu bắt đầu thay đổi).
ADC mã hóa vi sai (ADC được mã hóa delta) chứa bộ đếm ngược, mã từ đó được gửi đến DAC phụ. Tín hiệu đầu vào và tín hiệu từ DAC phụ được so sánh bằng bộ so sánh. Nhờ phản hồi tiêu cực từ bộ so sánh đến bộ đếm, mã trên bộ đếm liên tục thay đổi để tín hiệu từ DAC phụ khác biệt ít nhất có thể với tín hiệu đầu vào. Sau một thời gian, chênh lệch tín hiệu trở nên nhỏ hơn giá trị tối thiểu và mã bộ đếm được đọc dưới dạng tín hiệu số đầu ra của ADC. ADC loại này có dải tín hiệu đầu vào rất lớn và độ phân giải cao, nhưng thời gian chuyển đổi phụ thuộc vào tín hiệu đầu vào, mặc dù bị hạn chế từ phía trên. Trong trường hợp xấu nhất, thời gian chuyển đổi bằng Tmax=(2q)/fс, trong đó q là dung lượng bit ADC, fс là tần số của bộ tạo xung nhịp đếm. ADC mã hóa vi sai thường là lựa chọn tốt để số hóa các tín hiệu trong thế giới thực, vì hầu hết các tín hiệu trong hệ thống vật lý không có xu hướng thay đổi đột ngột. Một số ADC sử dụng phương pháp kết hợp: mã hóa vi phân và xấp xỉ liên tiếp; điều này đặc biệt hiệu quả trong trường hợp các thành phần tần số cao trong tín hiệu được biết là tương đối nhỏ.
Các ADC so sánh có tín hiệu răng cưa (một số ADC thuộc loại này được gọi là ADC tích hợp, chúng cũng bao gồm các ADC đếm nối tiếp) chứa một bộ tạo điện áp răng cưa (trong ADC đếm nối tiếp, một bộ tạo điện áp bước bao gồm bộ đếm và DAC), bộ so sánh và một bộ đếm thời gian. Tín hiệu răng cưa tăng tuyến tính từ mức dưới lên mức trên, sau đó nhanh chóng giảm xuống mức dưới. Tại thời điểm bắt đầu tăng, bộ đếm thời gian bắt đầu. Khi tín hiệu tăng dần đạt đến mức tín hiệu đầu vào, bộ so sánh sẽ được kích hoạt và dừng bộ đếm; giá trị được đọc từ bộ đếm và cung cấp cho đầu ra ADC. Loại ADC này có cấu trúc đơn giản nhất và chứa số phần tử tối thiểu. Đồng thời, các ADC đơn giản nhất thuộc loại này có độ chính xác khá thấp và nhạy cảm với nhiệt độ cũng như các thông số bên ngoài khác. Để tăng độ chính xác, một bộ tạo đoạn đường nối có thể được chế tạo xung quanh một bộ đếm và một DAC phụ trợ, nhưng cấu trúc này không có ưu điểm nào khác so với các ADC xấp xỉ liên tiếp và các ADC mã hóa vi sai.
ADC có cân bằng điện tích (bao gồm ADC có tích hợp hai giai đoạn, ADC có tích hợp nhiều giai đoạn và một số loại khác) chứa bộ tạo dòng ổn định, bộ so sánh, bộ tích phân dòng, bộ tạo xung nhịp và bộ đếm xung. Sự chuyển đổi xảy ra trong hai giai đoạn (tích hợp hai giai đoạn). Trong giai đoạn đầu tiên, giá trị điện áp đầu vào được chuyển đổi thành dòng điện (tỷ lệ với điện áp đầu vào), được cung cấp cho bộ tích hợp dòng điện, điện tích ban đầu bằng 0. Quá trình này kéo dài trong khoảng thời gian TN, trong đó T là chu kỳ của bộ tạo xung nhịp, N là hằng số (một số nguyên lớn xác định thời gian tích lũy điện tích). Sau thời gian này, đầu vào bộ tích hợp bị ngắt khỏi đầu vào ADC và được kết nối với máy phát dòng điện ổn định. Độ phân cực của máy phát sao cho nó làm giảm điện tích tích lũy trong bộ tích phân. Quá trình phóng điện tiếp tục cho đến khi điện tích trong bộ tích phân giảm xuống bằng không. Thời gian phóng điện được đo bằng cách đếm xung đồng hồ từ thời điểm bắt đầu phóng điện cho đến khi bộ tích phân đạt điện tích bằng 0. Số xung đồng hồ được tính toán sẽ là mã đầu ra ADC. Có thể chỉ ra rằng số xung n đếm được trong thời gian phóng điện bằng: n=UinN(RI0)−1, trong đó Uin là điện áp đầu vào của ADC, N là số xung của tầng tích lũy (định nghĩa ở trên), R là điện trở của điện trở chuyển điện áp đầu vào thành dòng điện, I0 là giá trị dòng điện từ máy phát dòng ổn định, xả bộ tích phân ở giai đoạn thứ hai. Do đó, các tham số hệ thống có khả năng không ổn định (chủ yếu là điện dung của tụ tích phân) không được đưa vào biểu thức cuối cùng. Đây là hệ quả của quá trình hai giai đoạn: các lỗi xuất hiện ở giai đoạn thứ nhất và thứ hai sẽ được loại trừ lẫn nhau. Không có yêu cầu nghiêm ngặt nào ngay cả đối với độ ổn định lâu dài của bộ tạo xung nhịp và điện áp phân cực của bộ so sánh: các thông số này chỉ phải ổn định trong một thời gian ngắn, nghĩa là trong mỗi lần chuyển đổi (không quá 2TN). Trên thực tế, nguyên tắc tích phân hai giai đoạn cho phép tỷ lệ của hai đại lượng tương tự (dòng đầu vào và dòng tham chiếu) được chuyển đổi trực tiếp thành tỷ lệ mã số (n và N theo thuật ngữ được xác định ở trên) mà hầu như không có thêm lỗi nào được đưa ra. Độ rộng điển hình của loại ADC này là 10 đến 18 bit. Một ưu điểm nữa là khả năng xây dựng các bộ chuyển đổi không nhạy cảm với nhiễu định kỳ (ví dụ, nhiễu từ nguồn điện lưới) do tích hợp chính xác tín hiệu đầu vào trong một khoảng thời gian cố định. Nhược điểm của loại ADC này là tốc độ chuyển đổi thấp. ADC cân bằng điện tích được sử dụng trong các thiết bị đo có độ chính xác cao.
ADC có khả năng chuyển đổi trung gian sang tốc độ lặp lại xung. Tín hiệu từ cảm biến đi qua bộ chuyển đổi mức và sau đó qua bộ biến đổi điện áp-tần số. Do đó, đầu vào của mạch logic tự nhận được tín hiệu có đặc tính chỉ là tần số xung. Bộ đếm logic nhận các xung này làm đầu vào trong thời gian lấy mẫu, do đó tạo ra vào cuối thời gian lấy mẫu một tổ hợp mã bằng số với số xung mà bộ chuyển đổi nhận được trong thời gian lấy mẫu. Những ADC như vậy khá chậm và không chính xác lắm, tuy nhiên lại rất đơn giản để thực hiện và do đó có chi phí thấp.
Sigma-delta ADC (còn gọi là delta-sigma ADC) thực hiện chuyển đổi tương tự sang số với tốc độ lấy mẫu cao hơn nhiều lần so với yêu cầu và thông qua quá trình lọc, chỉ để lại dải phổ mong muốn trong tín hiệu.
ADC phi điện tử thường được xây dựng trên cùng một nguyên tắc.
ADC thương mại
Theo quy định, chúng được sản xuất dưới dạng vi mạch.
Đối với hầu hết các ADC, độ sâu bit nằm trong khoảng từ 6 đến 24 bit và tần số lấy mẫu lên tới 1 MHz. ADC Mega- và gigahertz cũng có sẵn (tháng 2 năm 2002). ADC Megahertz được yêu cầu trong máy quay video kỹ thuật số, thiết bị quay video và bộ điều chỉnh TV kỹ thuật số để số hóa toàn bộ tín hiệu video. ADC thương mại thường có sai số đầu ra từ ±0,5 đến ±1,5 LSB.
Một trong những yếu tố làm tăng giá thành chip là số lượng chân, vì chúng buộc gói chip phải lớn hơn và mỗi chân phải được gắn vào khuôn. Để giảm số lượng chân, ADC hoạt động ở tốc độ lấy mẫu thấp thường có giao diện nối tiếp. Việc sử dụng ADC với giao diện nối tiếp thường cho phép tăng mật độ đóng gói và diện tích bo mạch nhỏ hơn.
Thông thường các chip ADC có một số đầu vào tương tự được kết nối trong chip với một ADC thông qua bộ ghép kênh tương tự. Các mô hình ADC khác nhau có thể bao gồm các thiết bị lấy mẫu và giữ, bộ khuếch đại thiết bị hoặc đầu vào vi sai điện áp cao và các mạch tương tự khác.
Ứng dụng khác
Chuyển đổi tương tự sang số được sử dụng ở bất cứ nơi nào cần nhận và xử lý tín hiệu tương tự ở dạng kỹ thuật số.
Các ADC video đặc biệt được sử dụng trong bộ điều chỉnh TV của máy tính, thẻ đầu vào video và máy quay video để số hóa tín hiệu video. Đầu vào micrô và âm thanh đường truyền của máy tính được kết nối với ADC âm thanh.
ADC là một phần không thể thiếu của hệ thống thu thập dữ liệu.
Các ADC xấp xỉ liên tiếp có dung lượng 8-12 bit và ADC sigma-delta có dung lượng 16-24 bit được tích hợp trong các bộ vi điều khiển đơn chip.
Cần có ADC rất nhanh trong máy hiện sóng kỹ thuật số (sử dụng ADC song song và đường ống)
Cân hiện đại sử dụng ADC có độ phân giải lên tới 24 bit, chuyển đổi tín hiệu trực tiếp từ cảm biến đo biến dạng (sigma-delta ADC).
ADC là một phần của modem vô tuyến và các thiết bị truyền dữ liệu vô tuyến khác, nơi chúng được sử dụng cùng với bộ xử lý DSP làm bộ giải điều chế.
ADC cực nhanh được sử dụng trong các hệ thống ăng-ten trạm gốc (được gọi là ăng-ten SMART) và trong mảng ăng-ten radar.
Chuyển đổi công nghệ ky thuật sô (ĐẮC) - một thiết bị để chuyển đổi mã kỹ thuật số (thường là nhị phân) thành tín hiệu tương tự (dòng điện, điện áp hoặc điện tích). Bộ chuyển đổi kỹ thuật số sang tương tự là giao diện giữa thế giới kỹ thuật số rời rạc và tín hiệu tương tự.
Bộ chuyển đổi tương tự sang số (ADC) thực hiện thao tác ngược lại.
DAC âm thanh thường nhận tín hiệu số ở dạng điều chế mã xung (PCM, điều chế mã xung) làm đầu vào. Nhiệm vụ chuyển đổi các định dạng nén khác nhau sang PCM được thực hiện bởi các codec tương ứng.
Ứng dụng
DAC được sử dụng bất cứ khi nào cần chuyển đổi tín hiệu từ dạng kỹ thuật số sang tín hiệu tương tự, chẳng hạn như trong đầu phát CD (Audio CD).
các loại DAC
Các loại DAC điện tử phổ biến nhất là:
Bộ điều chế độ rộng xung là loại DAC đơn giản nhất. Một nguồn dòng điện hoặc điện áp ổn định được bật định kỳ trong một khoảng thời gian tỷ lệ thuận với mã kỹ thuật số được chuyển đổi, sau đó chuỗi xung thu được được lọc bằng bộ lọc thông thấp tương tự. Phương pháp này thường được sử dụng để điều khiển tốc độ của động cơ điện và cũng đang trở nên phổ biến trong âm thanh Hi-Fi;
DAC lấy mẫu quá mức, chẳng hạn như DAC delta-sigma, dựa trên mật độ xung thay đổi. Lấy mẫu quá mức cho phép bạn sử dụng DAC có độ sâu bit thấp hơn để đạt được độ sâu bit cao hơn của chuyển đổi cuối cùng; Thông thường, DAC delta-sigma được xây dựng trên cơ sở DAC một bit đơn giản, thực tế là tuyến tính. DAC bit thấp nhận tín hiệu xung có mật độ xung được điều chế (với thời lượng xung không đổi nhưng có chu kỳ nhiệm vụ thay đổi), được tạo bằng phản hồi âm. Phản hồi tiêu cực hoạt động như một bộ lọc thông cao cho nhiễu lượng tử hóa.
Hầu hết các DAC bit lớn (hơn 16 bit) đều được xây dựng theo nguyên tắc này do tính tuyến tính cao và chi phí thấp. Tốc độ của DAC delta-sigma đạt tới hàng trăm nghìn mẫu/giây, độ sâu bit lên tới 24 bit. Để tạo ra tín hiệu được điều chế mật độ xung, có thể sử dụng bộ điều biến delta-sigma bậc một hoặc bậc cao hơn như MASH (Định hình nhiễu nhiều giai đoạn). Việc tăng tần số lấy mẫu lại sẽ làm giảm bớt các yêu cầu đối với bộ lọc thông thấp đầu ra và cải thiện khả năng khử nhiễu lượng tử hóa;
Một loại DAC có trọng số trong đó mỗi bit của mã nhị phân được chuyển đổi tương ứng với một điện trở hoặc nguồn dòng điện được kết nối với một điểm tổng chung. Dòng điện nguồn (độ dẫn của điện trở) tỷ lệ thuận với trọng lượng của bit mà nó tương ứng. Do đó, tất cả các bit khác 0 của mã đều được thêm vào trọng số. Phương pháp cân là một trong những phương pháp nhanh nhất, nhưng nó có đặc điểm là độ chính xác thấp do cần một bộ nhiều nguồn hoặc điện trở có độ chính xác khác nhau và trở kháng thay đổi. Vì lý do này, DAC cân có độ rộng tối đa là 8 bit;
DAC dạng bậc thang (mạch R-2R chuỗi). Trong R-2R-DAC, các giá trị được tạo ra trong một mạch đặc biệt gồm các điện trở có điện trở R và 2R, gọi là ma trận trở kháng không đổi, ma trận này có hai loại kết nối: ma trận một chiều - dòng điện và ma trận nghịch đảo điện áp. Việc sử dụng các điện trở giống hệt nhau có thể cải thiện đáng kể độ chính xác so với DAC cân thông thường, vì việc tạo ra một bộ phần tử chính xác có cùng thông số là tương đối đơn giản. DAC loại R-2R cho phép bạn loại bỏ các giới hạn về độ sâu bit. Với việc cắt laser các điện trở trên một đế, sẽ đạt được độ chính xác 20-22 bit. Phần lớn thời gian chuyển đổi được dành cho bộ khuếch đại thuật toán, vì vậy nó phải nhanh nhất có thể. Tốc độ của DAC là vài micro giây hoặc ít hơn (tức là nano giây);
Đặc trưngDAC được đặt ở đầu đường dẫn tương tự của bất kỳ hệ thống nào, do đó, các tham số của DAC quyết định phần lớn các tham số của toàn bộ hệ thống. Sau đây là những đặc điểm quan trọng nhất của DAC.
Độ sâu bit là số mức tín hiệu đầu ra khác nhau mà DAC có thể tái tạo. Thường được chỉ định bằng bit; số bit là logarit cơ số 2 của số cấp. Ví dụ: DAC một bit có khả năng tái tạo hai mức () và DAC tám bit có thể tái tạo 256 (). Độ sâu bit có liên quan chặt chẽ với số bit hiệu dụng (ENOB, Số bit hiệu dụng), cho biết độ phân giải thực tế có thể đạt được trên một DAC nhất định.
Tần số lấy mẫu tối đa là tần số tối đa mà DAC có thể hoạt động, tạo ra kết quả chính xác ở đầu ra. Theo định lý Nyquist-Shannon (còn gọi là định lý Kotelnikov), để tái tạo chính xác tín hiệu tương tự từ dạng kỹ thuật số, tần số lấy mẫu phải không nhỏ hơn hai lần tần số tối đa trong phổ tín hiệu. Ví dụ: để tái tạo toàn bộ dải tần âm thanh mà con người nghe được, phổ của dải này mở rộng đến 20 kHz, tín hiệu âm thanh cần phải được lấy mẫu ở tần số ít nhất là 40 kHz. Tiêu chuẩn Audio CD đặt tốc độ lấy mẫu âm thanh thành 44,1 kHz; Để tái tạo tín hiệu này, bạn sẽ cần một DAC có khả năng hoạt động ở tần số này. Card âm thanh máy tính giá rẻ có tần số lấy mẫu là 48 kHz. Tín hiệu được lấy mẫu ở các tần số khác được lấy mẫu lại thành 48 kHz, điều này làm giảm một phần chất lượng tín hiệu.
Tính đơn điệu là đặc tính của DAC nhằm tăng tín hiệu đầu ra tương tự khi mã đầu vào tăng.
THD+N (độ méo sóng hài tổng cộng + nhiễu) là thước đo độ méo và nhiễu được DAC đưa vào tín hiệu. Được biểu thị bằng phần trăm của công suất hài và nhiễu trong tín hiệu đầu ra. Một thông số quan trọng cho các ứng dụng DAC tín hiệu nhỏ.
Dải động là tỷ lệ giữa tín hiệu lớn nhất và nhỏ nhất mà DAC có thể tái tạo, được biểu thị bằng decibel. Tham số này liên quan đến độ sâu bit và ngưỡng nhiễu.
Đặc tính tĩnh:
DNL (độ phi tuyến vi phân) - mô tả mức tăng tín hiệu tương tự thu được bằng cách tăng mã thêm 1 bit có ý nghĩa nhỏ nhất (LSB) khác với giá trị chính xác;
INL (phi tuyến tính tích phân) - mô tả mức độ khác biệt của đặc tính truyền của DAC so với đặc tính lý tưởng. Đặc tính lý tưởng là tuyến tính chặt chẽ; INL cho biết điện áp ở đầu ra DAC của một mã nhất định cách xa đặc tính tuyến tính bao xa; thể hiện ở mức lương tối thiểu;
nhận được;
Thiên kiến.
Đặc điểm tần số:
SNDR (tỷ lệ tín hiệu trên tạp âm + độ méo) - đặc trưng bằng decibel tỷ lệ giữa công suất tín hiệu đầu ra trên tổng công suất của nhiễu và biến dạng sóng hài;
HDi (hệ số sóng hài thứ i) - đặc trưng cho tỷ lệ giữa sóng hài thứ i và sóng hài cơ bản;
THD (hệ số biến dạng sóng hài) - tỷ lệ giữa tổng công suất của tất cả các sóng hài (trừ sóng hài đầu tiên) với công suất của sóng hài đầu tiên







